CV D-Robotics
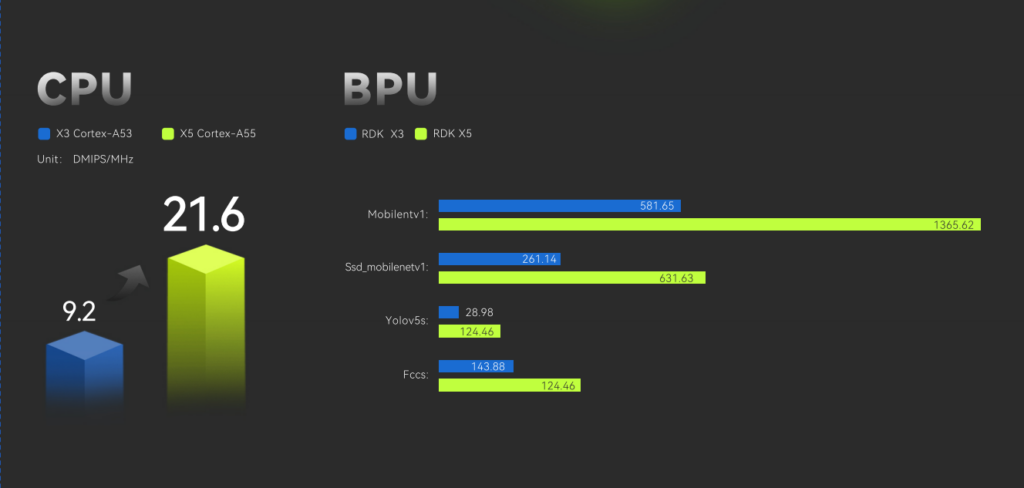
The USX51’s computing power flight controller is composed of D-Robotics’ RDK X5 Module, which provides 10 TOPS INT8 BPU AI computing power and 21.6 DMIPS/MHz CPU general computing power. D-Robotics has launched an intelligent algorithm package based on TogetheROS.Bot for robot manufacturers and ecosystem developers, aiming to improve the efficiency of integrating and deploying robot […]