
The USX10 Pixhawk 6X® is the latest in the successful Pixhawk® flight controller series, designed and manufactured in collaboration with the UTMSYS® and PX4 teams.
It is based on the Pixhawk® autopilot FMUv6X standard, autopilot bus standard, and connector standard. It not only comes pre-installed with the advanced PX4 autopilot system, but also achieves a qualitative leap in hardware configuration and performance.

Product
- Equipped with an H7 double-precision floating-point unit processor and running at 480MHz, the Pixhawk 6X flight controller provides powerful computing power, laying a solid foundation for the development of complex algorithms and functions, easily handling the most challenging flight missions and leading drone performance to new heights.
- The Pixhawk 6X flight controller features triple-redundant IMUs with independent buses and power domains, along with dual-redundant barometers, creating a robust safety net. Seamless failover in the event of a sensor failure ensures flight stability and safety, ensuring every flight is a surefire success.
- With an integrated 100M Ethernet PHY, the Pixhawk 6X flight controller enables high-speed communication with mission computers and high-end payloads. This unimpeded data transmission significantly expands application boundaries and meets the demanding requirements of specialized fields.
- The Pixhawk 6X flight controller utilizes a new vibration reduction system and an automotive-grade, low-noise IMU to effectively filter out high-frequency vibrations, accurately collect data, and significantly improve flight stability and control accuracy, making it suitable for diverse and complex flight scenarios.
- Supporting both PX4 and ArduPilot firmware, the Pixhawk 6X flight controller offers a high degree of user customization. Flexible switching and expanded functionality allow for customized flight preferences and specialized operational requirements.
Processors and
- FMU processor: STM32H753
- 32-bit Arm® Cortex®-M7, 480MHz, 2MB Flash, 1MB RAM
- IO processor: STM32F103
- 32-bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- Onboard sensors
- Accelerometer/gyroscope: 3x ICM-45686
- Barometer: ICP20100 and BMP388
- Compass: BMM150
Electrical
- Rated voltage:
- Maximum input voltage: 6V
- USB power input: 4.75~5.25V
- Servo rail input: 0~36V
- Current rating:
TELEM1Output current limiter: 1.5A- All other ports combined output current limiter: 1.5A
Mechanical
- size
- 57.83 x 122.00 x 27.85mm
- weight
- 170g
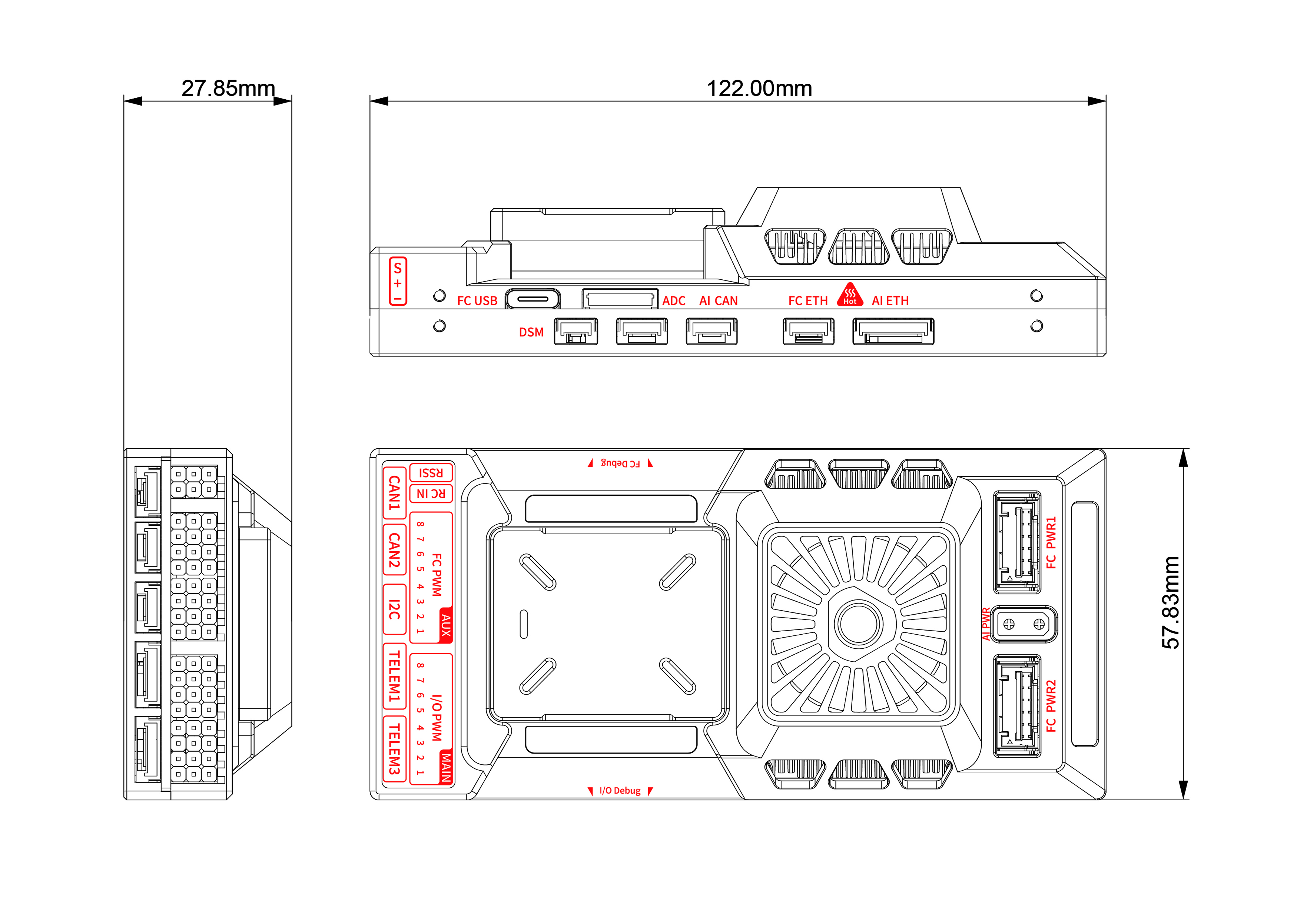
Interface
- 16-PWM servo output
- Spektrum / DSM R/C input
- Dedicated R/C input for PPM and S.Bus input
- Dedicated analog/PWM RSSI input and S.Bus output
- 4 general purpose serial ports
- 3 with full flow control
- 1 port with individual 1.5A current limit (Telem1)
- 1 with I2C and additional GPIO lines for external NFC reader
- 2 GPS ports
- 1 full GPS plus safety switch port
- 1 basic GPS port
- 1 I2C port
- 1 Ethernet port
- Transformerless applications
- 100Mbps
- 1 SPI bus
- 2 chip select lines
- 2 data ready lines
- 1 SPI synchronization line
- 1 SPI reset line
- 2 CAN buses for CAN peripherals
- CAN bus with separate mute control or ESC RX-MUX control
- 2 power input ports with SMBus
- 1 AD and IO port
- 2 additional analog inputs
- 1 PWM/capture input
- 2 dedicated debug and GPIO lines
- Other features:
- Working and storage temperature: -40~85℃
No responses yet